注目の自動車ニュース
マツダ CO-PILOT CONCEPT のテストドライブ同乗…1.0と2.0の違いは?[動画]
-

《写真撮影 中尾真二》
-
《写真撮影 中尾真二》
-

《写真撮影 中尾真二》
-

《写真撮影 中尾真二》
-

《写真撮影 中尾真二》
-

《写真撮影 中尾真二》
-

《写真撮影 中尾真二》
マツダが11月に発表した「CO-PILOT CONCEPT」(コ・パイロット・コンセプト)には2022年の「ラージ商品群」に実装される予定の1.0と、2025年に市場投入を予定している2.0の2種類がある。このうち試作段階の2.0プロトタイプに試乗することができた。その機能や1.0との違いを解説する。
◆2.0では脳機能の低下を予兆する技術を搭載
CO-PILOT CONCEPTは、「ドライバー状態検知技術」「HMI仮想運転技術」「ドライバー異常時退避技術」の3つのコア技術によって構成される。ドライバー状態検知は、すでに閉眼や姿勢の崩れなどで警報を出したりする機能としてマツダ市販車にも実装されている。25年投入予定の技術では、これに異常予兆検知の機能を加え、HMI仮想運転技術と合わせて、異常時退避自動走行の起動トリガーとして利用する。
異常予兆は1.0では実装されず2.0で実装される予定だ。異常の予兆は、ドライバーの視点移動パターンから脳機能低下を判定する。広島大学の研究をベースに実用化を進めているもので、大脳の活動が低下すると、意識して周辺を見なくなり、変化のある部分や特徴的な部分(サリエンシーという)のみに反射的に視点が動く無意識の動きに着目し、本人が自覚していないレベルの脳機能の異常を検知する技術だ。
姿勢が崩れるなど明かな症状が出る前に異常を検知し、ドライバーや同乗者に注意喚起を行ったり事故になる前に予防安全措置を講じることができる。
◆ドライバーとAIのデュアルシステム:HMI仮想運転技術
HMI仮想運転技術は、ドライバーの運転操作の背後で車両AIがバックアップ的に運転をシミュレートすることで、異常な運転や危険な状態を予測・判断し、必要ならシステムがドライバーに変わって車両の制御を行う。
カメラやセンサー情報、路車間通信データ(V2I)、GPSやロケーターの情報をベースに、マツダ独自の機械学習モデルを実装したアルゴリズム(AI)が、さながら自動運転のように仮想的な運転をシミュレートする。この結果と、ドライバーの操作や車両の動きが一致しないと危険な状態と判断する。
この説明だけでは、他のADAS機能や、一部のトラックなどに実装されている緊急停止機能(MRM:ミニマルリスクマヌーバ)と変わりないように思えるかもしれない。しかし、バックアップ的に常時運転操作をシミュレートするためには、能動的に運転操作をするための意思決定、侵入可能な最適な進路、周辺状況の把握が必要で、要件としては自動運転を行うのとほぼ同じだ。
1.0では、異常検知時に同一車線内で安全停止を自動で行うため、仮想運転技術の一部が実装される。だが、本格的な実装は2.0以降となる。自動運転に近い制御を行うにはECUアーキテクチャを新しいものにする必要があるからだ。そのため22年投入の1.0では現状のADAS機能に準じたものになる。
◆異常検知後の動作
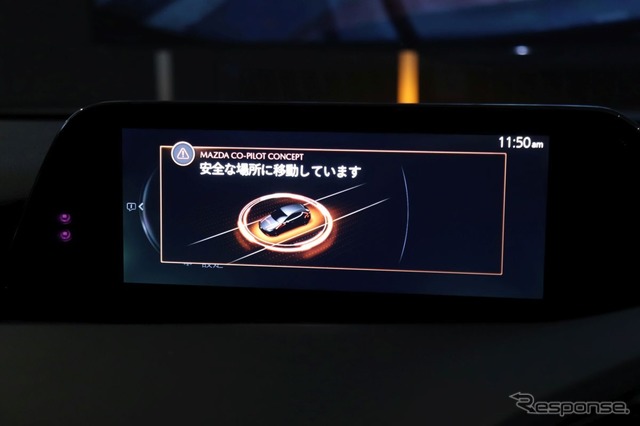
CO-PILOT CONCEPTは自動運転ではないが、ドライバー異常を検知したらシステムが運転を代行する。ただし、全面代行ではなく、車両を安全に停止させるまでを行い、停止後は機能を停止する。このとき、状況が許す範囲で2次災害を防ぐように停止場所、停止位置などを臨機応変に制御する(2.0)。
具体的に行うのは、まず異常を検知したことをドライバーや同乗者に知らせるワーニングや音声ガイダンス。ドライバーの容体急変では同乗者もパニックになることがある。それによる不幸な事故を回避するには、同乗者にもシステムが車両を停止させる旨を伝え落ち着かせ、停止した場合の措置などを指示してやる必要もある。
同時に外部についても車両が異常な状態にあることを周知させる必要がある(車外報知)。ホーン、ハザードに加え、ブレーキランプの高速点滅で周辺車両に異常を知らせ、停止後の救護措置などを喚起する。停止後は緊急通報も自動で行う。
停止までの処理は、走行している車線や道路の状態によりそのまま停止する、車線変更して左に寄せる、安全帯(高速道路)や路肩、退避可能なスペースの有無、歩行者・信号・駐車車両の有無などを総合的に判断する(2.0)。
たとえば、退避処理に入って減速・車線変更をしようとしている間に信号が赤に変わった、横断歩道に人を確認した、といった場合、信号や横断歩道手前で停止する制御だ。あるいは、減速中に前のクルマが急ブレーキを踏んでも対応するといった処理も想定する。
◆2.0プロトタイプ車両は高精度3Dマップ作成車両並みの装備
これらの処理を実現するには、多数のセンサーに加えインフラやクラウドとの通信機能(ITSスポット対応交差点は信号機の状態を送信している)、高精度の3Dマップ、高精度GPSロケーターなどが必要になる。
2.0のプロトタイプである試乗車は、『マツダ3』3の装備に追加して12のカメラや高精度3Dマップ、GPSロケーターなどが搭載されており、Googleマップや高精度3Dマップを作成する専用車両並みの仕様になっている。25年に投入される2.0までには、カメラやセンサーの数はおそらくもっと少なくなる(最適化される)。
マツダでは、この技術の海外展開も視野に入れているので、高精度マップや路車間通信に頼らない方法も考えている。そのため、ECUアーキテクチャは刷新され、走行した道路の情報やマップを学習し、マップやV2Xインフラがない場所でも安全な退避動作ができるようにするプランもある。
1.0では、22年に投入されるラージ商品群の車両を想定しているため、ここまで高度な制御はできない。異常検知後、車内・車外報知を行いつつ、同一車線(車線変更処理はしない)で安全停止を行い、緊急通報を行う。停止途中にITSスポットに対応していない信号機・交差点があった場合、車外報知と従来のADAS機能に期待することになる。前走車がいれば衝突被害軽減ブレーキの機能で止まることができる可能性がある。前走車がない場合も、直交する車両や障害物検知によって停止できるかもしれない。
◆同乗体験:2.0プロトタイプはどこまでできるのか
試乗デモはマツダのドライバーが運転するクルマに同乗する形で行われた。試乗コースでは3回ほど異常時退避を実施する。一般道でも車線変更をしながら路肩に安全停止する実験を2回。最後の1回は、異常時退避中に、交通量の多い幹線道路を避けて路地に入って停止する実験だ。
公道での実験ため、退避場所に駐車車両があったり路肩に停止できない場合もあった。左側に並走車がいると車線変更をしなかったり、退避途中の赤信号を検知したり(試乗コースの交差点はITSスポット対応)、いくつかのパターンがあった。路肩まで到達できなくても、完全停止に失敗することはなかった。
3回目の実験では、幹線道路から避ける道路手前の横断歩道の歩行者を検知して、横断歩道手前で完全停止した。どの場合も、音声ガイダンスが「左側車両を検知しました」「赤信号検知しました」となぜ止まったのかを教えてくれたので、正しく機能した上での停止であることが確認できた。
退避動作中は、白線や地図データ、GPSによりカーブも自動で曲がってくれる。止まるときも、車線変更は段階的に行い(当然だが)、最後の第一走行車線から路肩へ寄せるときもスムースな寄せ方だ。助手席側からアクセスできるように路肩と車両の間は70cmほど開けるという。オートドアロックも解除されるので、外からの救出も窓を割るなどの必要はない。
緊急時の停止や退避は、人間が運転していてもどこに停めるかの判断は難しい。一般的には正解の停止場所でも裏目にでることもある。状況に応じた判断をモデル化するのは難しいと思うが、CO-PILOT CONCEPT 1.0のリリース、2025年の2.0がどこまで機能を実現してくれるか楽しみである。