注目の自動車ニュース
ヘルムAI、カメラのみで都市部の自動運転を実現…レベル2+から4まで対応可能
-
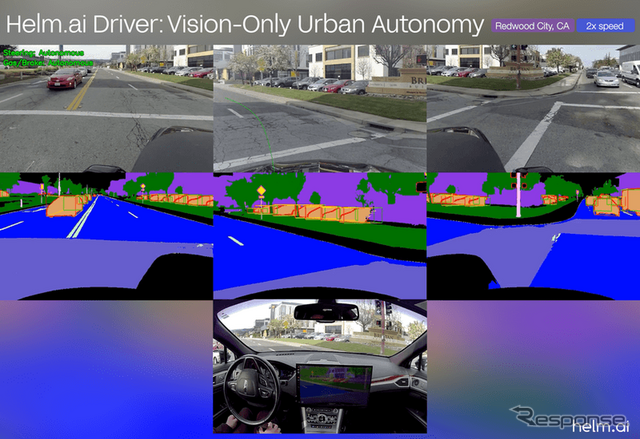
《photo by Helm.ai》
先進的な自動運転AIソフトウェアを提供するヘルムAIは、カメラのみで動作する自動運転ソフトウェアスタック「ヘルムAIドライバー」の大幅な機能拡張を発表した。
このシステムは、高度なレベル2+からレベル4の都市部自動運転まで、シームレスに拡張できる量産対応のソフトウェアである。
同社独自のファクタード・エンボディードAIアーキテクチャに基づいて構築されたこのシステムは、高精度マップやライダーセンサーに依存せず、複雑な都市交通において人間のような滑らかな運転を実現する。基盤となるモデルがレベルに依存しない設計のため、自動車メーカーは高度なレベル2+システムを即座に展開でき、ハードウェアや規制のロードマップの進展に応じて、同じソフトウェアアーキテクチャでレベル3の「アイズオフ」機能やレベル4の完全自動運転機能を実現できる。
発表に合わせて同社は、カリフォルニア州レッドウッドシティの都市環境でヘルムAIドライバーが走行するデモ動画を公開した。動画では、交差点での左右折、複雑な信号への対応、他の道路利用者との動的なやり取りを自律的に処理する様子が示されている。すべての走行は、量産を想定した自動運転システムの標準的なテストおよび検証プロトコルに従い、安全ドライバーの監視下で安全に実施された。
自動車業界は現在「データの壁」に直面している。これは、自動運転アプローチがエッジケースシナリオでの性能向上のために、指数関数的に多くの希少で高価な実世界データを必要とする段階である。さらに、そのようなデータが利用可能であったとしても、ピクセルから制御までの一体型「エンドツーエンド」モデルは「ブラックボックス」として機能し、レベル3以上で求められる厳格な安全認証に必要な解釈可能性を欠いている。
対照的に、ヘルムAIドライバーは、データ不足と解釈可能性の両方に同時に対処するファクタード・エンボディードAIアーキテクチャを採用している。このアプローチは、自動運転の問題を「認識」と「ポリシー」という2つの明確で解釈可能なレイヤーに分割する。認識を個別に解決することで、システムは生のセンサーデータを情報豊富で高度に構造化されたセマンティックセグメンテーションと3D情報に変換する。ヘルムAIのエンドツーエンドポリシーモデルは、生のピクセルではなく、この解釈可能なセマンティック幾何学を入力として受け取り、道路構造や交通ルールについて「推論」する。
このファクタード・アプローチにより、インターネット規模のデータセットでの大規模トレーニングが可能になり、エンドツーエンドポリシーモデルの高効率なデータトレーニングが実現され、「データの壁」を打破する助けとなる。重要なのは、この構造が自動車メーカーにとって重要な透明性を提供し、監視付きレベル2+からISO 26262認証可能なレベル3およびレベル4展開まで拡張できる、明確で監査可能なソフトウェア基盤を提供することである。
従来のアプローチでは通常、都市部での走行能力を達成するために数十億ドルの設備投資と数百万マイルのトレーニングデータが必要とされるが、ヘルムAIドライバーのプランナーは、わずか1000時間の実走行データでこのレベルの成熟度に到達した。
この画期的な成果は、ヘルムAI独自の教師なし学習技術「ディープティーチング」によって実現された。この技術により、ニューラルネットワークは、インターネット規模のビジョンデータセットに対する高コストな人間によるアノテーションを必要とせず、容易に入手可能な大量の非運転データから直接学習できる。セマンティックシミュレーションと組み合わせることで、システムはフォトリアリスティックなピクセルをレンダリングする計算オーバーヘッドなしに、事実上無限の幾何学的シナリオでトレーニングできる。生のピクセルではなく世界の「セマンティック幾何学」でシステムをトレーニングすることで、ヘルムAIは自動運転開発の従来のコストと時間の障壁を回避している。
量産車向け自動運転システムの真の試金石は、手動調整やHDマップなしに「未知の」環境を処理する能力。これを検証するため、ヘルムAIは最近、カリフォルニア州トーランス(大ロサンゼルス地域)でソフトウェアを展開し、システムの汎化能力を実証した。
その地域の特定の道路に関する事前トレーニングなしに、ヘルムAIドライバーは「ゼロショット」自動運転ステアリングを実行できた。この地域を超えて汎化する能力により、ヘルムAIの自動車メーカーパートナーは、都市ごとのデータ収集やジオフェンシングという法外なコストをかけずに、レベル2+からレベル4の機能を世界規模で展開できるという。