注目の自動車ニュース
自動運転「レベル4」、本格普及は2027年度目標…SIP自動運転シンポジウムで取り組み紹介
-

《写真撮影 会田肇》
-
《写真撮影 会田肇》
-
《写真撮影 会田肇》
-

《写真撮影 会田肇》
-
《写真撮影 会田肇》
-
《写真撮影 会田肇》
-
《写真撮影 会田肇》
-
《写真撮影 会田肇》
-

《写真撮影 会田肇》
-
《写真撮影 会田肇》
-
《写真撮影 会田肇》
-

《写真撮影 会田肇》
-
《写真撮影 会田肇》
-

《写真撮影 会田肇》
-
《写真撮影 会田肇》
-
《写真撮影 会田肇》
-
《写真撮影 会田肇》
-
《写真撮影 会田肇》
-
《写真撮影 会田肇》
-
《写真撮影 会田肇》
-
《写真撮影 会田肇》
-

《写真撮影 会田肇》
-
《写真撮影 会田肇》
-
《写真撮影 会田肇》
自動運転レベル4等の先進モビリティサービスの実現・普及に向け、2021年9月に立ち上げた「RoAD to the L4」についてのシンポジウムが、「SIP成果展示会&自動運転シンポジウム」の2日目に秋葉原UDX(東京都千代田区)で開催された。その概要をレポートする。
◆自動運転レベル4等の先進モビリティサービス「RoAD to the L4」の全体像
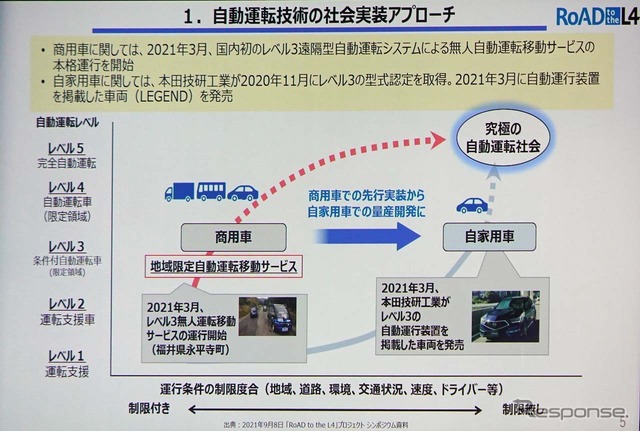
シンポジウムではまず、産業技術総合研究所プロジェクトコーディネーターの横山利夫氏が「自動運転技術の社会実装アプローチ」と題して、自動運転レベル4等先進モビリティサービス研究開発・社会実装プロジェクト「RoAD to the L4」の全体像について説明した。
横山氏は自動運転レベル4の実現について、「技術的ハードが高いものの、交通事故の削減、高齢者等の移動手段の確保、ドライバー不足の解消などに大変期待されている」とした上で、「産業競争力の向上、関連産業の効率化にも(自動運転レベル4の実現は)大きな意義がある」と説明した。
ただ、自由に走り回るマイカーでの自動運転レベル4の実現はかなり難しいのが現実だ。横山氏は「マイカーについては様々な条件下で最大限利用してもらうとの観点で、可能な限りの自動運転のレベル向上を図るアプローチとなる」と説明。その一方でシャトルバスなど「走行距離を5km、10kmといった制限をする代わりに、(レベル4のような)高度な自動運転機能を搭載するなどして社会実装を目指す」とした。
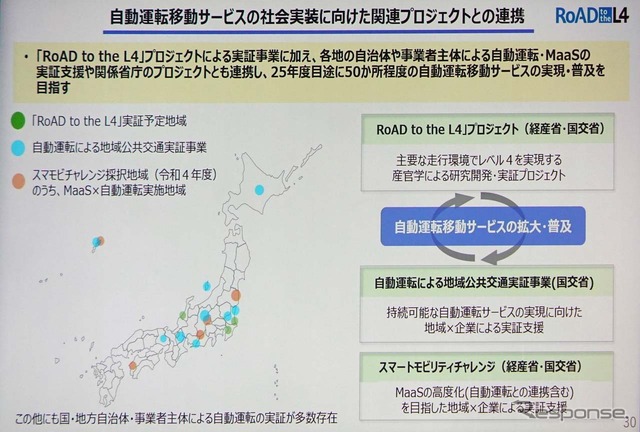
「RoAD to the L4」の実現に向けては、「無人自動運転サービスの実現および普及について具体的なKPI(Key Performance Indicator:目標達成のための業績評価の指標)を設定し、合わせてIoTやAIを活用した新しいモビリティサービスの普及、そのために必要となる人材の確保・育成、社会受容性の醸成を図っていく」目標を掲げ、これが先進モビリティサービスの社会実装につながっていくという。
そして、「無人自動運転移動サービスの実現・普及に向けて事業化を加速し、2025年を目処に50カ所程度で自動運転移動サービスを実現し、2027年度には本格普及を目指したい」とし、今後は「RoAD to the L4」の社会実装に向けて、技術的課題や社会的受容性、さらにはその分野での人材育成も含め積極的に取り組んでいくとした。
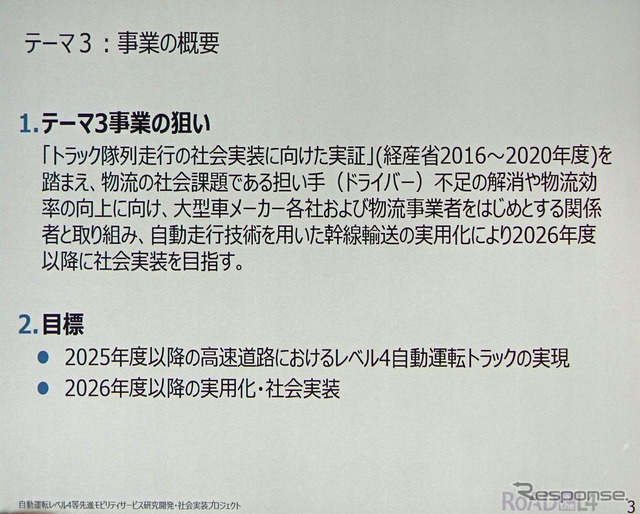
◆テーマ3「2026年度以降に自動運転トラックを用いた物流の新しい形の実現」
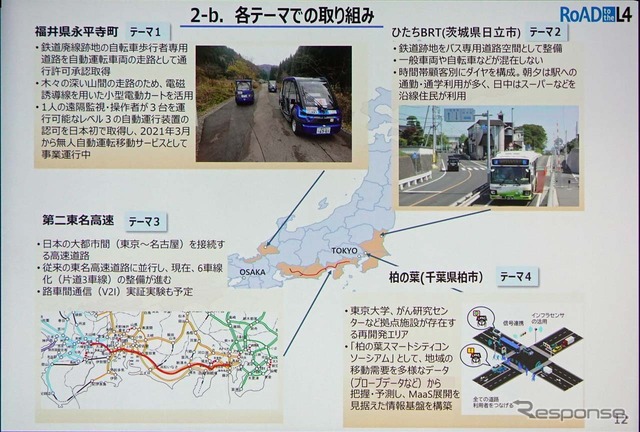
これを受けて日野自動車の技官であり、日本自動車工業会 大型車委員会大型車技術部会長もつとめる小川 博氏は、「RoAD to the L4」で定められた4つのテーマのうちの一つ、テーマ3の物流領域をテーマとした実証内容を紹介した。
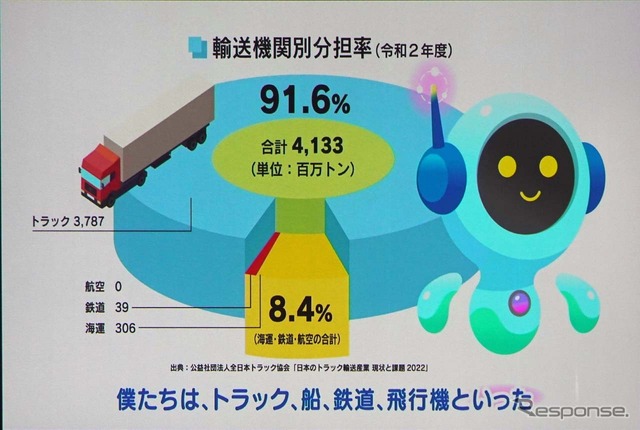
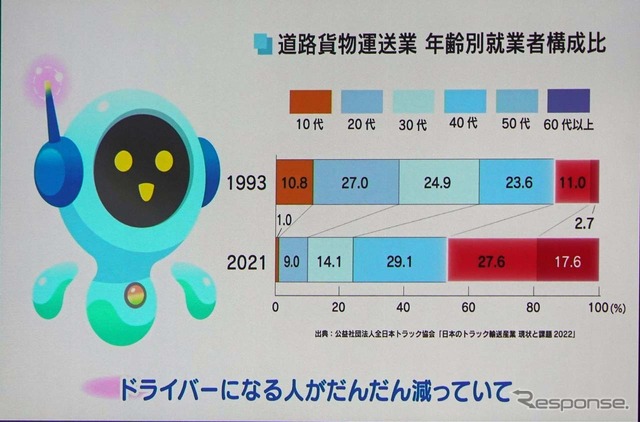
ここでは「2026年度以降に自動運転トラックを用いた物流の新しい形の実現」を狙う。実は日本における物流の9割はトラックによって運ばれている。しかし、そのドライバーは年々減ってきており、ドライバー不足が顕在化。そこで自動運転トラックを使った新しい形が動き出そうとしているわけだ。
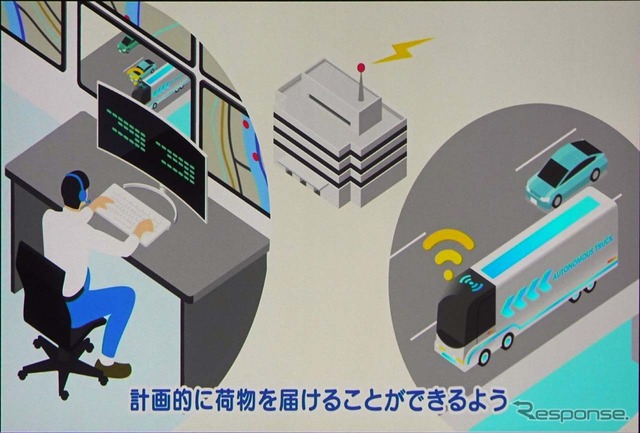
近未来の物流を具体的に説明すると、自動運転トラックが高速道路を走行して大都市間の物流を担うというものだ。その導入の最初のステップでは荷物を載せたトラックをドライバーが高速道路まで運転し、高速道路へ入ったら自動運転に切り替わる。そして、高速道路を出ると再びドライバーが運転を担当することになる。これでドライバーの運転時間を減らすことができるわけだ。
次のステップでは、ドライバーが中継エリアまで運転してそこで荷物を完全自動運転トラックに積み替え、大都市間の移動は自動運転トラックが無人走行。走行中のドラックは運行監視システムで常にチェックされ、安全に荷物が届けられるようサポートする。そして、目的地の中継エリアからは別のトラックに積み替えて。現地のドライバーが荷物を引き継いで運転する流れとなる。今までのトラックと自動運転トラックで走行する区間を効率よく分担するのだ。
小川氏は「これは社会課題であるドライバー不足の解消とか、物流の効率化を目指して自動運転トラックを活用するというものだ。自動走行技術を用いて幹線輸送の実用化の社会実装を目指し、最終的には無人による自動運転トラックの実現は目指すものの、それはあくまで手段でしかない」と述べ、目標として「2025年度以降の高速道路におけるレベル4自動運転トラックの実現と合わせて、2026年度以降の実用化、社会実装を目指す」ことにしているとした。
◆テーマ1「遠隔監視のみ(レベル4)で自動運転サービスの実現に向けた取り組み」
ここで登壇したのは産業技術総合研究所デジタルアーキテクチャー研究センター主席研究員の加藤 晋氏。講演内容は「2022年度に限定エリア・車両での遠隔監視のみ(レベル4)で自動運転サービスの実現に向けた取り組み」。
ここで参画しているのはヤマハ発動機、三菱電機、ソリトンシステムズの3社。加藤氏は「現在は目標1として、永平寺で配線跡地において低速での自動運転レベル3で本格運行中しており、今後は遠隔監視のみのレベル4を目指す。その次の目標2としては、この場所に限らず制度整備をしつつ横展開を図っていけるよう寄与していきたい」と述べた。
現在は「2022年度中にレベル4の認可を受ける段階にまで来ており、そのサービス実証を行っている段階」(加藤氏)だが、これも4月1日以降に施行される道路交通法の改正に基づく特定自動運行にかかる許可の制度に基づく必要がある。そのため、レベル4での運行は2023年に入ってからになる見込みだという。
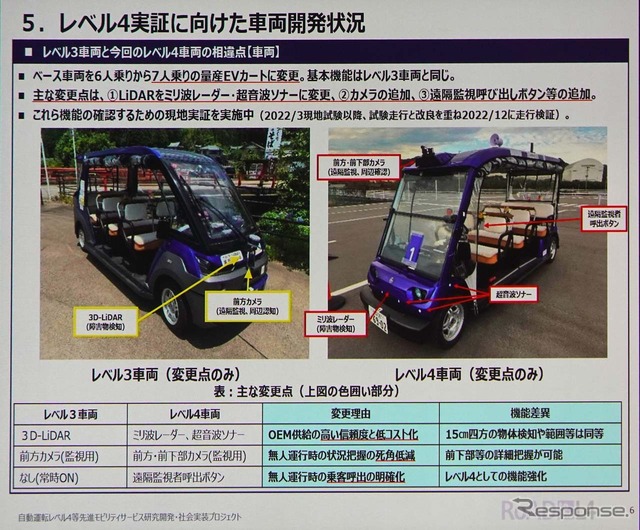
そして、車両はレベル4に対応するため、従来のLi-DARに加えてミリ波レーダーや超音波ソナーを追加し、遠隔監視者呼び出しボタンも新たに準備した。こうしたセンサー類は事業展開する地域にごとに合わせた仕様にすることになる。そして、いずれは「コストを下げて市販化もできるような信頼性の高いもの(自動運転車両)を作り込んでいくことも目標としている」(加藤氏)とした。
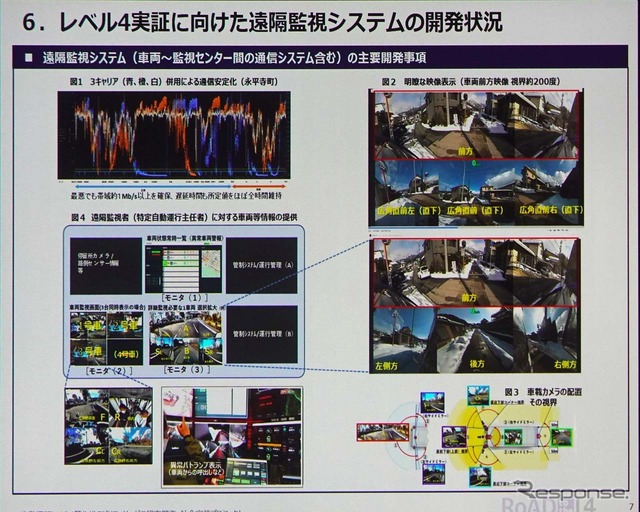
また遠隔監視システムについては、「運転者が乗車しないだけに何かあった場合に車両が自動的に停止するシステムを搭載しているが、その後の初期対応がどこまでできるのかが重要。故障や事故があった際に外から中がきちんと見えるようにしたり、リアルタイムで外部と対話できるようなシステムの開発も必要になる」とした。
◆テーマ2「さらに、対象エリア、車両を拡大すると共に、事業性を向上させるための取組」
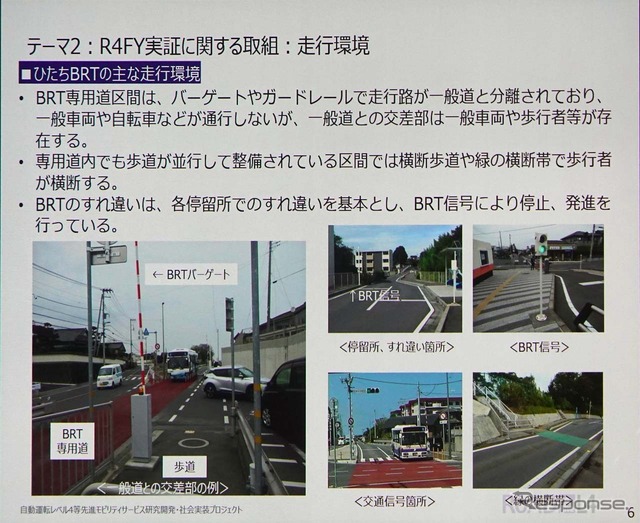
社会実装へ向けた事業性を高めるための取り組みとして、茨城県日立市のBRT運行について講演したのは、日本工営 交通運輸事業本部交通政策事業部交通都市部次長 石川正樹氏。
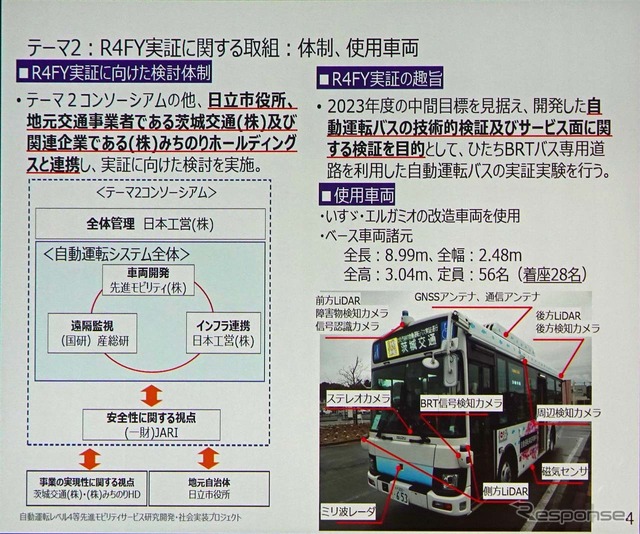
このテーマに参画しているのは、日本工営、産業総合研究所、日本自動車研究所、先進モビリティの4者で、コンソーシアムを組んで実施しているものだ。その目的は2025年までに多様なエリアや多様な作業を用いたレベル4の自動運転サービスを全国50カ所程度実現することにあり、茨城県日立市のBRT運行はその目標達成のための事業となる。
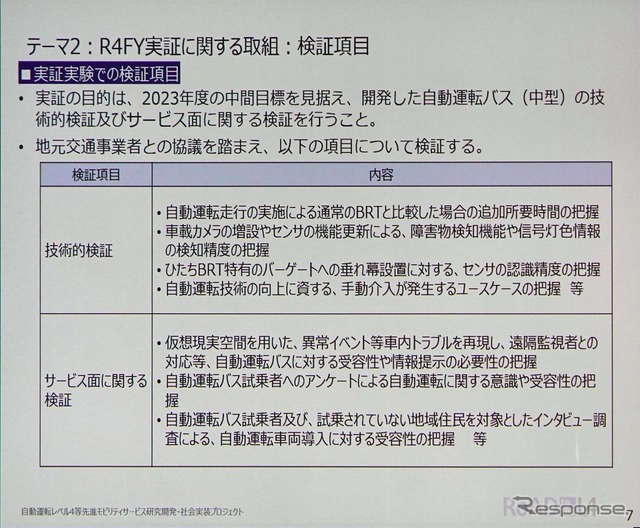
石川氏はこの事業について「2022年度に実証実験を行っているが、そこで洗い出された課題を踏まえて2023年度を中間目標として乗務員ありのレベル4走行を実施。2025年には遠隔監視によるドライバーレスのレベル4を実現したいと考えている」と説明。現在はそのための車両やインフラ監視等のシステムの機能を検討や開発をしながら課題を一つずつ潰していっている段階にあるという。
使用車両はいすゞの中型バス「エルガミオ」で、ここにGPS機能や各種Li-DAR、カメラを設置。これらを使って交通信号やすれ違いのためのBRT信号を認識したり、周辺の障害物や歩行者を検知するためのカメラを使って安全性を高め、自動運転の実施を進めていくことにしている。
走行区間は約6.1kmでBRT専用道で、そのルート上での自動運転を目指す。路線の終端で一般道と接する区間については、今回はまずドライバーによる手動運転で行い、その実証実験は2022年12月16日から23年2月28日の期間を無事終了したところだ。運行は9時~5時までの間で4往復運行。石川市によれば、「一部には一般道と交差する場所もあり、一般車や歩行者との錯綜も制御する必要があったが、実証実験は無事終了することができた」との報告がなされた。
◆テーマ4「混在空間でレベル4を実現するためのV2X連携などの取組」
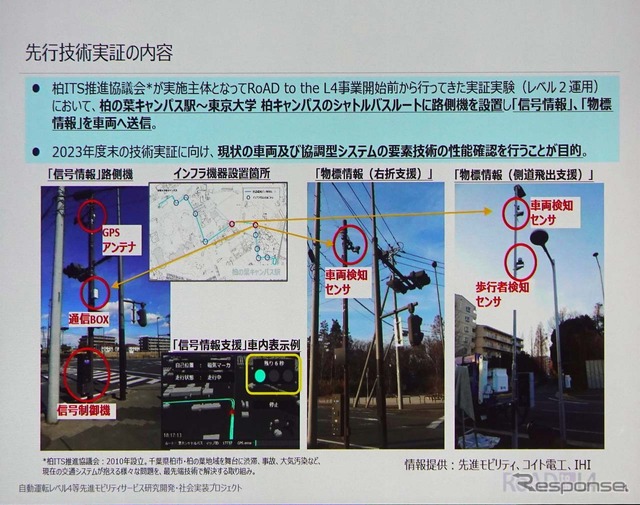
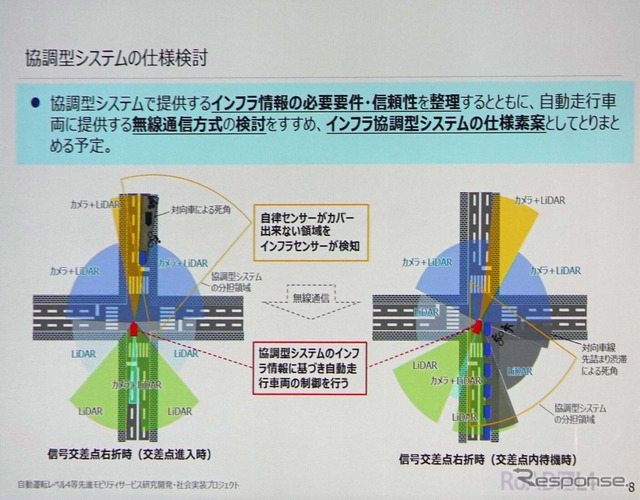
ここでのテーマは「混在空間でレベル4を展開するためのインフラ協調や車車間・歩者間の連携などの取組」として、柏の葉(千葉県柏市)における自動得運転の実証実験について、東京大学生産技術研究所教授 中野公彦氏が講演を行った。
このテーマに参画しているのは、東京大学の他、名古屋大学、産業総合研究所、三菱総合研究所の4者で、共にコンソーシアム形式で実施しているものとなる。
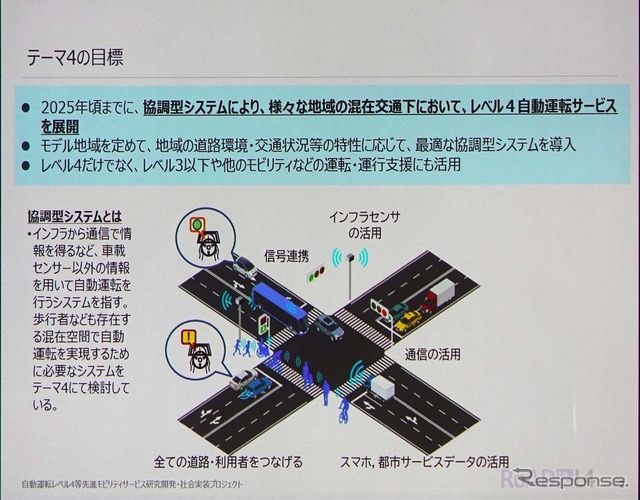
このテーマで最大のポイントとなるのが、協調型システムにより様々な地域の混在交通下においてレベル4の自動運転サービスを展開することにある。協調型システムとはインフラから通信で情報を得るなどして、車載センサー以外の情報を用いて自動運転を行うことを指す。その対象は自動車だけでなく歩行者なども含まれ、信号機周辺の交差点を対象として、そうした混在空間で自動運転に必要なシステムを検討している。
スケジュールとしては2023年までを先行実証としてレベル2での運用を行い、2024年にはレベル4が可能な中型バスを使用。公道側には協調型路側機を設置して特定自動運行に向けたデータを取得する。その後、レベル4での特定自動運行を申請し、2025年にはレベル4モビリティサービスを想定した実証実験に入る予定としている。石川氏は「ここで培った経験を活かして事業化を目指し、他地域への横展開も行えるようにしたい」と今後の横展開への抱負を述べた。
◆自動運転の実証実験で先行する各自治体がパネルディスカッション
講演後は第二部として、実際に自動運転の実証実験を行う自治体によるパネルディスカッションが実施された。参加したのは茨城県境町、長野県塩尻市、新潟県佐渡市、愛知県、栃木県。
境町は他地域に先行してシャトルバス「NAVYA ARMA」を定常運行させ、運行エリアの拡大や規制緩和による保安要員の撤廃などを通した経験を説明。塩尻市は運営にあたって地元の人材活用を優先する取り組みを行い、独自のMaaSプロジェクトとして紹介した。佐渡市は自動運転の体験を通して地域の交通課題を正しく理解することが受容性醸成につながるとした。
愛知県は「次世代産業の新興」「地域諸課題の解決」の2つをテーマとして挙げ、3地域での実証実験について紹介。2023年には中部国際空港周辺でプレ実装を予定し、24年には名古屋駅周辺で約9kmにおよぶモビリティを実装。さらに愛・地球博記念公園内での実装も目指すという。また、栃木県は「ABCプロジェクト」として無人自動運転移動サービス導入検証事業について、現在行われている6カ所を紹介した。